針對自動駕駛落地難點問題 智行者兩篇論文入選頂級國際會議ICRA2023
客車網2023年3月6日獲悉,智行者團隊發布的兩篇論文近日被頂級國際會議ICRA 2023接收,分別為《Faster-LIO: Lightweight Tightly Coupled Lidar-inertial Odometry using Parallel Sparse Incremental Voxels》和《Anderson Acceleration for on-Manifold Iterated Error State Kalman Filters》。兩篇論文針對自動駕駛落地中的難點問題,分別提出了一種基于增量體素的高效率激光雷達慣導里程計和一種基于Anderson加速的迭代擴展卡爾曼濾波。
IEEE國際機器人與自動化協會每年主辦一次IEEE世界機器人與自動化大會(IEEE InternationalConference on Robotics and Automation,簡稱IEEE ICRA)。IEEE ICRA是機器人領域規模(千人以上)和影響力均排名第一的頂級國際會議,是機器人領域權威研究人員介紹其研究成果的首要國際論壇。

Faster-LIO: Lightweight Tightly Coupled Lidar-inertial Odometry using Parallel Sparse Incremental Voxels
本文提出了一種基于增量體素的激光雷達慣導里程計(LIO)方法,用于快速跟蹤旋轉和固態激光雷達掃描點云,為了獲得較高的跟蹤速度,本文既不使用復雜的基于樹的結構來劃分空間點云,也不使用嚴格的k近鄰(k-NN)查詢來計算點匹配。
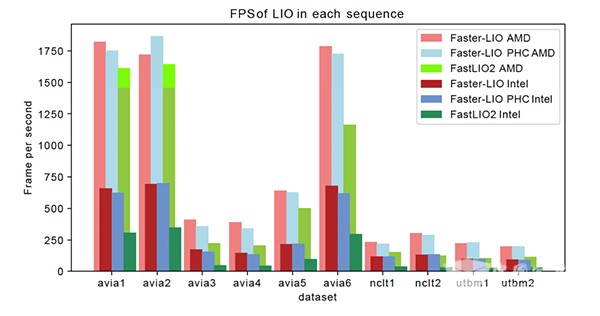
使用增量體素(iVox)作為點云空間數據結構,它是從傳統體素修改而來的,支持增量插入和并行近似k-NN查詢,本文在算法中提出了線性iVox和PHC(偽希爾伯特曲線)iVox作為兩種可選的底層結構。
實驗表明,在固態激光雷達中,iVox的每次掃描速度達到1000-2000HZ,而在32線激光雷達中,iVox的速度超過200赫茲(僅使用現代CPU),同時仍保持相同的精度水平!
Anderson Acceleration for on-Manifold Iterated Error State Kalman Filters
本文指出,迭代擴展卡爾曼濾波器(Iterated Extended Kalman Filter)是一種被廣泛應用于實時定位應用中的估計器,它通過多次迭代觀測方程,以找到更好的線性化點,每次只進行當前時間點的狀態估計,從而節省計算資源。
受最近迭代最近點算法(iterative closest point algorithm)的啟發,本文提出一種加速迭代誤差狀態卡爾曼濾波器(IESKFs)的方法。
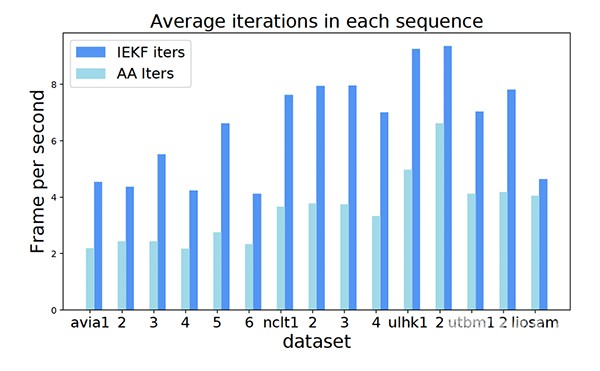
研究結果表明,IESKF可以轉換為一個迭代不動點問題,從而使得Anderson加速(AA)可以直接應用于IESKF的迭代,因為IESKF的誤差狀態自然存在于切空間中,而不需要額外的變換。
但在迭代期間,當前估計的切空間可能會發生變化,因此本文應該將切空間轉換到起始點來執行Anderson加速。文章提出了AA-IEKF,并將其應用于激光雷達慣性慣性里程計(LIO)系統來估計激光雷達的本體運動。實驗表明,Anderson加速可以有效減少ESKF的迭代次數,并降低總計算量。
1、凡本網注明“來源:www.zxzsfwgs.cn” 的所有作品,版權均屬于客車網,未經本網授權,任何單位及個人不得轉載、摘編或以其它方式使用上述作品。已經本網授權使用作品的,應在授權范圍內使用,并注明“來源:www.zxzsfwgs.cn”。違反上述聲明者,本網將追究其相關法律責任。
2、凡本網注明 “來源:XXX(非客車網)” 的作品,均轉載自其它媒體,轉載目的在于傳遞更多信息,并不代表本網贊同其觀點和對其真實性負責。
3、如因作品內容、版權和其它問題需要同本網聯系的,請在30日內進行。
※ 有關作品版權事宜請聯系:copyright#chinabuses.com
- 陳劍出任北京福田康明斯發動機有限公司總經理[09-27]
- 陳華出任康明斯中國供應鏈、質量和信息技術執行總監[09-26]
- 成都客車森鵬電子共攜手 繪制海外綠色交通新篇章[09-26]
- 逐鹿歐美市場 精進電動耀動2024漢諾威商用車展[09-26]
- 玉柴參加“與中國駐東盟經商參贊面對面”交流會[09-26]
- 北京祥龍公司與寧德時代簽署戰略合作協議[09-26]
- 媒體關注:從未勢能源看中國氫能企業的全球化之路[09-25]
- 盡顯“全天候”品質 歐輝BJ6105確實有點大不同 [09-25]

















