蘑菇車聯InterFusion融合感知框架論文被國際頂會IROS收錄
對自動駕駛來說,多傳感器融合感知一直是個難題。蘑菇車聯與清華大學猛獅團隊組成研究組,構建了融合感知框架InterFusion,能夠更好地結合4D毫米波雷達和激光雷達優勢,更準確地感知周圍環境。測試結果顯示,InterFusion的表現要明顯優于多個主流感知算法。此項研究成果被IROS 2022收錄為大會論文。

IROS、ICRA和ROBIO一并被業界公認為人工智能領域最具影響力的國際學術會議,蘑菇車聯今年的研究成果已被其中兩個會議收錄。今年IROS共收到3579投稿,其中的1716篇被接收,接收率為47.9%。此前,蘑菇車聯與清華聯手打造的路側數據集被ICRA 2022收錄。
激光雷達、毫米波雷達是自動駕駛車輛中常見的傳感器,二者分別通過發射激光束和毫米波來感知外部環境。激光雷達能夠提供3D感知數據,但其點云數據會受到距離影響,距離越遠越稀疏,在惡劣天氣下進一步惡化,穿透力強的毫米波雷達正好可以彌補這一缺點。
目前,4D毫米波雷達逐步進入市場,激光雷達與4D毫米波雷達的融合也受到更多關注。不過,現階段行業內大多數方案都無法實現兩種模態的相互作用,這不利于感知數據的最佳應用。
鑒于此,蘑菇車聯、清華的研究團隊提出一種低成本的融合感知框架InterFusion,能夠更好地發揮激光雷達、4D毫米波雷達各自優勢。InterFusion包含有數據預處理方法,能夠消除4D毫米波雷達點云角度偏移誤差;受自注意力機制(Self-attention Mechanism)啟發,InterFusion框架聚合了來自兩種模態的特征,并有效地識別了4D毫米波雷達和16線激光雷達特征之間的跨模態關系。在Astyx HiRes 2019數據集的實驗評估中,InterFusion融合感知框架在3D mAP中表現優于基線4.20% ,在BEV mAP中表現優于基線10.76%。
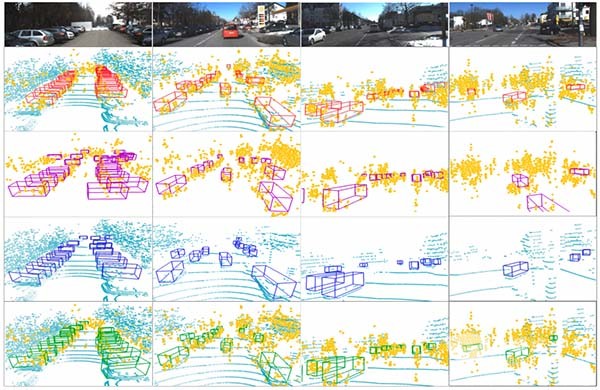
圖片從上到下數據來源依次為:相機,參照用真實數據,4D毫米波雷達,激光雷達,采用InterFusion融合架構的4D毫米波雷達+激光雷達
在上圖中,藍色點代表激光雷達點云,黃色點代表4D毫米波雷達點云,第一行是來自相機的原始圖像;第二行為作參照的、符合實際情況的真實數據;第三行的4D毫米波雷達點云稀疏,存在誤檢和漏檢;第四行激光雷達點云在長距離時變得稀疏,這意味著其對遠程對象的一些誤檢或漏檢。最后一行則是采用了InterFusion融合感知架構生成的激光雷達、4D毫米波雷達點云感知結果,可以看到其感知結果要優于第三、四行的單模態方法,十分接近第二行的真實數據。
InterFusion融合感知框架能夠有效提升自動駕駛安全性。車輛只有準確識別環境,才能做出更安全、更合理的規劃與決策。
作為“車路云一體化”方案的先行者和踐行者,蘑菇車聯積極探索自動駕駛前沿技術,公司與清華大學的多項研究成果有效提高蘑菇車聯“車路云一體化”系統的安全性、可靠性,為大規模應用提供有力支撐。
1、凡本網注明“來源:www.zxzsfwgs.cn” 的所有作品,版權均屬于客車網,未經本網授權,任何單位及個人不得轉載、摘編或以其它方式使用上述作品。已經本網授權使用作品的,應在授權范圍內使用,并注明“來源:www.zxzsfwgs.cn”。違反上述聲明者,本網將追究其相關法律責任。
2、凡本網注明 “來源:XXX(非客車網)” 的作品,均轉載自其它媒體,轉載目的在于傳遞更多信息,并不代表本網贊同其觀點和對其真實性負責。
3、如因作品內容、版權和其它問題需要同本網聯系的,請在30日內進行。
※ 有關作品版權事宜請聯系:copyright#chinabuses.com
- 陳華出任康明斯中國供應鏈、質量和信息技術執行總監[09-26]
- 成都客車森鵬電子共攜手 繪制海外綠色交通新篇章[09-26]
- 逐鹿歐美市場 精進電動耀動2024漢諾威商用車展[09-26]
- 玉柴參加“與中國駐東盟經商參贊面對面”交流會[09-26]
- 北京祥龍公司與寧德時代簽署戰略合作協議[09-26]
- 媒體關注:從未勢能源看中國氫能企業的全球化之路[09-25]
- 盡顯“全天候”品質 歐輝BJ6105確實有點大不同 [09-25]
- 森鵬出海 領航商用車數智化轉型[09-23]

















